





Over the last few years we’ve become accustomed to allowing computers in between our control inputs and the reactions from our bikes. Traction control and electronic throttles mean the physical connection between the twistgrip and engine has long since been severed, and the same increasingly applies to ABS and combined braking systems. Now manufacturers are turning their attention to steering systems to see whether computers could help with that aspect as well.
We’ve already seen, thanks to engineering experiments like Honda’s Riding Assist concepts, Yamaha’s MotoBot and MOTOROiD, and BMW’s autonomous R 1250 GS prototype, that it’s perfectly possible for a computer to handle a bike when given control of its steering, and even negotiate some pretty complex actions like lapping a racetrack or balancing when stationary. Meanwhile, lane-keeping systems on cars are now commonplace, and companies like Tesla and Honda are forging toward machines that can basically drive themselves (at least in limited circumstances), with so-called “Level 3” autonomy (out of a possible 6 levels) with the computer, rather than the driver, considered to be in control.
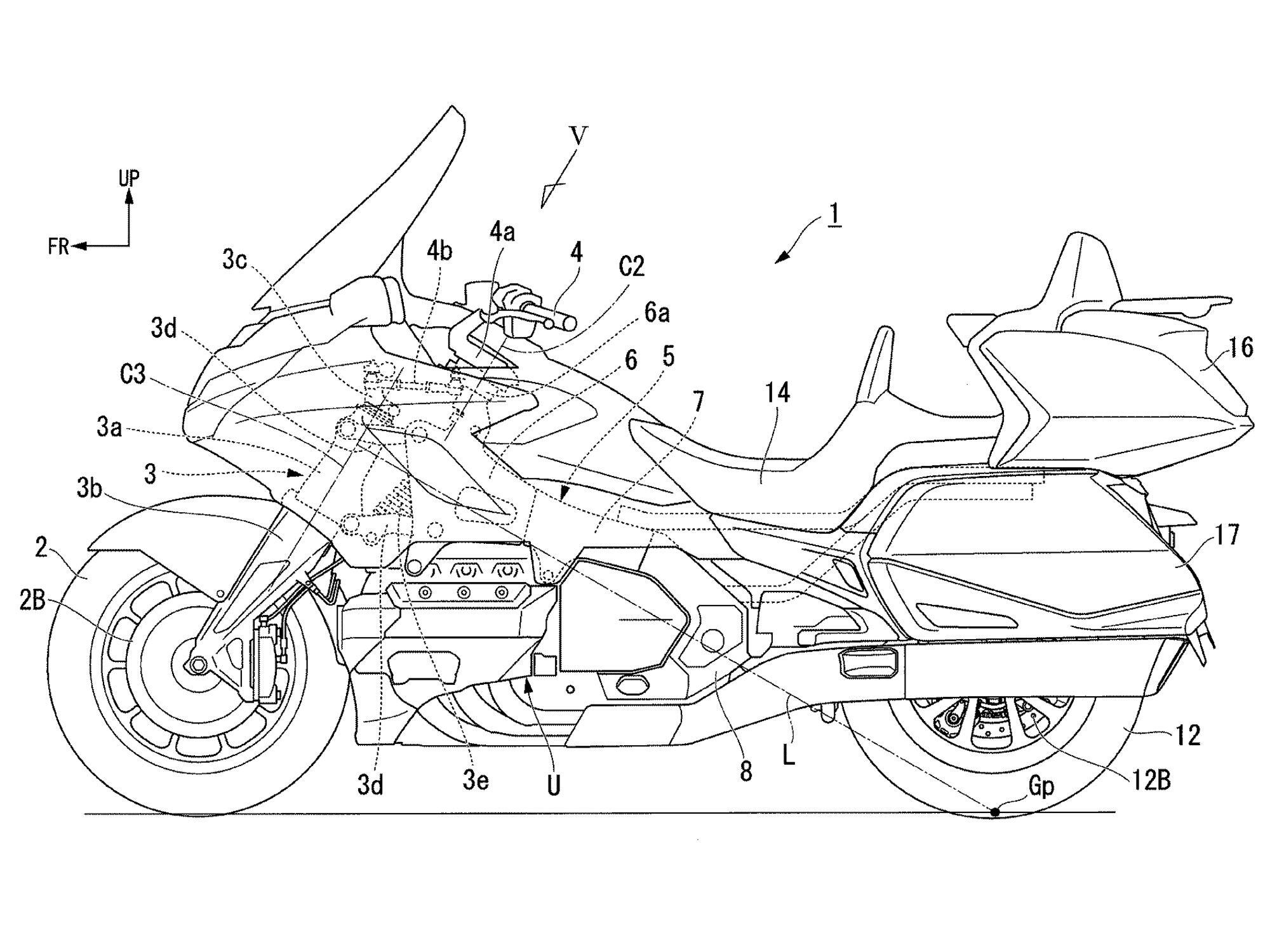
So how will this next-level tech make the leap to production bikes? A hint comes from a new Honda patent application that shows a Gold Wing fitted with a setup that looks to be a steppingstone between an adaptive steering damper and an active steering-assistance system.
Adjustable steering dampers, and even electronically adjusted ones controlled via a bike’s central computer, aren’t new, but they generally provide a variable level of damping to prevent tank-slappers or sudden steering movements rather than actively influencing a bike’s steering. Honda’s new design takes a more proactive approach with an electric actuator instead of a damper.
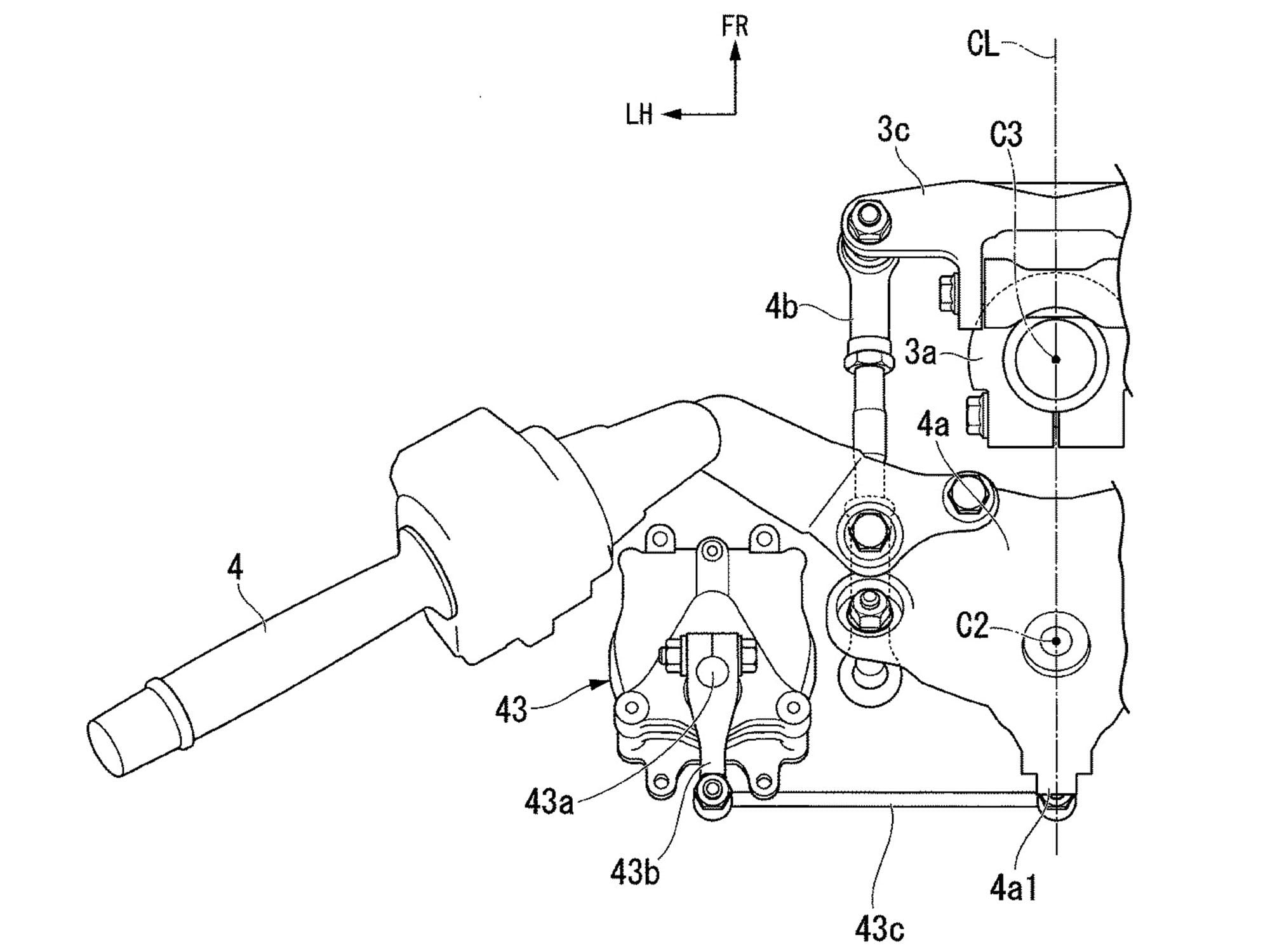
The patent application shows how the actuator is connected to the otherwise normal Gold Wing’s steering. It’s basically a high-torque servo attached to the steering via a rod. In normal use, the servo doesn’t hinder the movement of the bars and front wheel, and could even be programmed to assist the rider—basically acting as a power-steering system, which could in turn open the door to the use of different steering geometry.
RELATED: 2020 KTM 1290 Super Adventure Ushers In The Radar Age
However, the actuator is also connected to the bike’s inertial measurement unit and onboard computer, monitoring changes in lean angle and yaw as well as wheel speeds to determine whether the bike is reacting as the rider intends or if it’s entering an unwanted condition.
With a bike like the Gold Wing, the actuator could be used to help control high-speed wobbles that might be caused by side winds or uneven loads, but it’s also intended to come into play during emergency situations, when the rear wheel is sliding during corners or acceleration or when the ABS is in action to prevent lockups. Here, the actuator and the sensors built into it to measure steering force and angle become another tool in the suite of rider aids that already includes traction control and ABS.
RELATED: Kawasaki To Employ Radar-Assisted Safety Systems
Details of the steering angle and steering torque are constantly fed into the bike’s main ECU along with wheel speeds, throttle position, brake pressure, vehicle speed, and all the angular acceleration info from the IMU. Then, on the output side of the system, the steering actuator becomes another tool, alongside the brake control system, the throttle position, ignition spark, and fuel injection, to help the bike’s computer maintain control.
Its effectiveness at that stage will come down largely to the programming and mapping of the electronics.

Honda is by no means alone in developing ideas like this. As mentioned, BMW and Yamaha have also developed self-riding bikes, and electronics giant Bosch, which already leads the way in ABS and stability control systems as well as radar cruise control, also has its eye on developing steering assistance for bikes. Once in use, these systems could quickly develop into lane-assist aids and even make the step toward semi-autonomous riding, where you could let the bike take over an element of control during boring parts of a ride.
